
Jack Bradley
I'm Jack Bradley, a third-year Engineering Physics student at UBC exploring the intersection of software, robotics, and simulation. I worked on manufacturing automation solutions on co-op at Zaber Technologies, built a vision-guided autonomous robot, and work on suspension and vehicle dynamics simulation as part of UBC's Formula SAE team. Lately I've been working on leveraging modern multibody simulation and machine learning techniques to create a suspension generator. This site is where I share my projects and ideas.
Posts

Using Stages to Make More Stages at Zaber Technologies
November 13, 2025
Custom peristaltic pump system for automated cyanoacrylate dispensing with non-contact tube sensing, Python state machine control, and computer vision verification. Designed and...
Read more →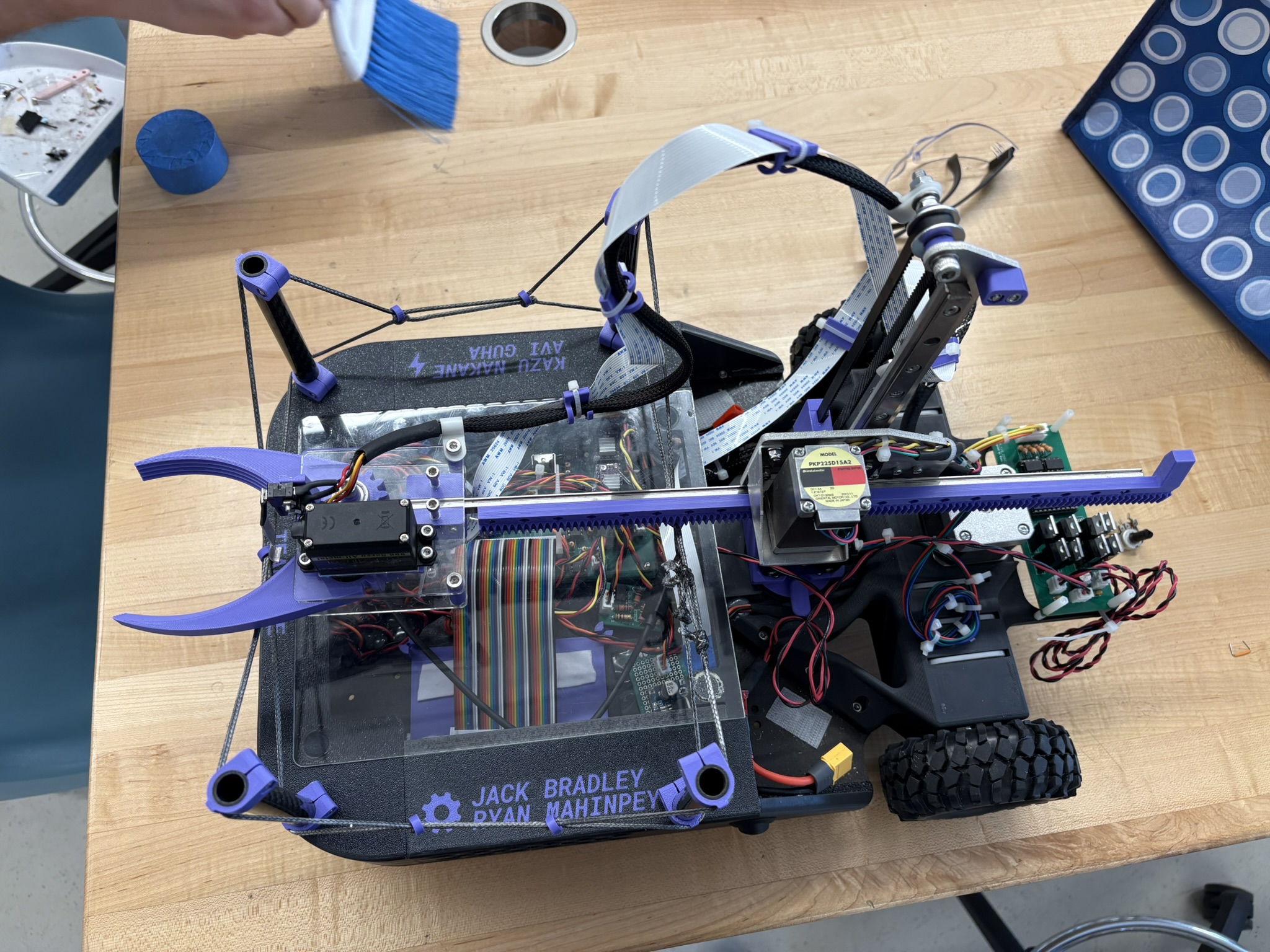
Robot Summer 2025: Pet Rescue Bot
August 15, 2025
Seven-week autonomous robot project featuring a 3D-printed chassis, custom R–Z–θ arm, and YOLOv11 vision system. Built entirely from scratch by a team of four for UBC’s Robot Su...
Read more →
Front Anti-Roll Bar (FARB) Development
May 20, 2025
Fast-adjustable blade-style anti-roll bar designed with multibody simulation and manufactured using 3D-printed soft jaws and waterjet fixturing. Enabled sub-30 second stiffness ...
Read more →
Topology Optimized Bellcranks
May 12, 2024
On my first season on the Formula UBC team, I redesigned our front bellcrank using parametric CAD, FEA, and topology optimization to cut mass while increasing stiffness and simp...
Read more →